
OCTOPUS Results
 OCTOPUS Publications and Patents
OCTOPUS Publications and Patents
The OCTOPUS Integrating Project represents the frontier research in the Embodied Intelligence field of FET (Future and Emerging Technologies). OCTOPUS is going to produce a number of different results as new science, new scientific data, new technologies, new design principles and educational material. OCTOPUS is not focused only on the study and imitation of one octopus arm, but on the study of the whole octopus body and how its eight arms are coordinated in manipulation and locomotion tasks. The new technologies expected to result concern actuation (soft actuators), sensing (distributed flexible tactile sensors), control and robot architectures (distributed control, coordination of many degree of freedom), materials (with variable stiffness), mechanisms (soft-bodied structures), kinematics models.
 Roboticists who study biological systems look at the knowledge
of the biological principles and their generalization, to take
inspiration for the design of novel products. With the goal of the development
of a new technological solutions or systems, the analysis of a biological function
or characteristic requires the ability to select and properly transfer
the key principles, to consequently define the biological specification to
guide the engineering design.
Roboticists who study biological systems look at the knowledge
of the biological principles and their generalization, to take
inspiration for the design of novel products. With the goal of the development
of a new technological solutions or systems, the analysis of a biological function
or characteristic requires the ability to select and properly transfer
the key principles, to consequently define the biological specification to
guide the engineering design. Thus, bio-inspired technologies not simply copy nature, but rather carefully choose nature's behaviour of focus, and extract the underlying principle at a level of description that is actually possible to implement.
Bioengineering and biological methods are applied to study, measure and model octopus performance, with results of new scientific data beyond the state of the art, as well as novel design principles and specifications for robotics purpose.
Novel instruments and methods targeted to the bioengineering characterization of the octopus capabilities (elongation and force of the arms, swimming, and so on) have been developed.
The features of the octopus arm, as the muscular, nervous and connective tissue arrangement and biomechanics, have been replicated for the soft actuators, electrical cables and mechanical interface structure and performance.
The first soft arm prototype has been developed using the biological specifications appropriately translated into novel design principles.
 Different prototypes of soft arms have been developed, basically composed of silicone, driven by cables and shape memory alloys technologies.
Different prototypes of soft arms have been developed, basically composed of silicone, driven by cables and shape memory alloys technologies.
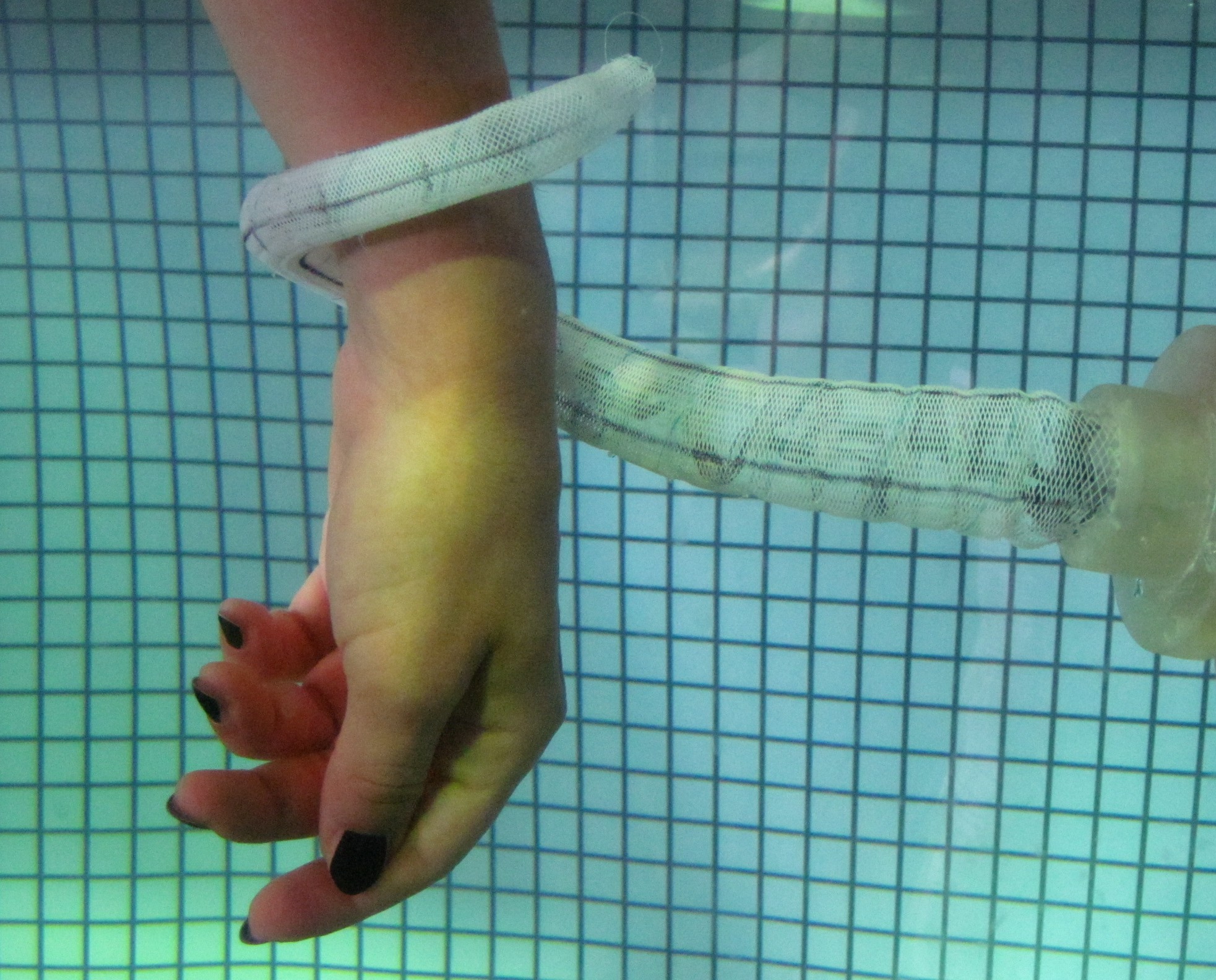
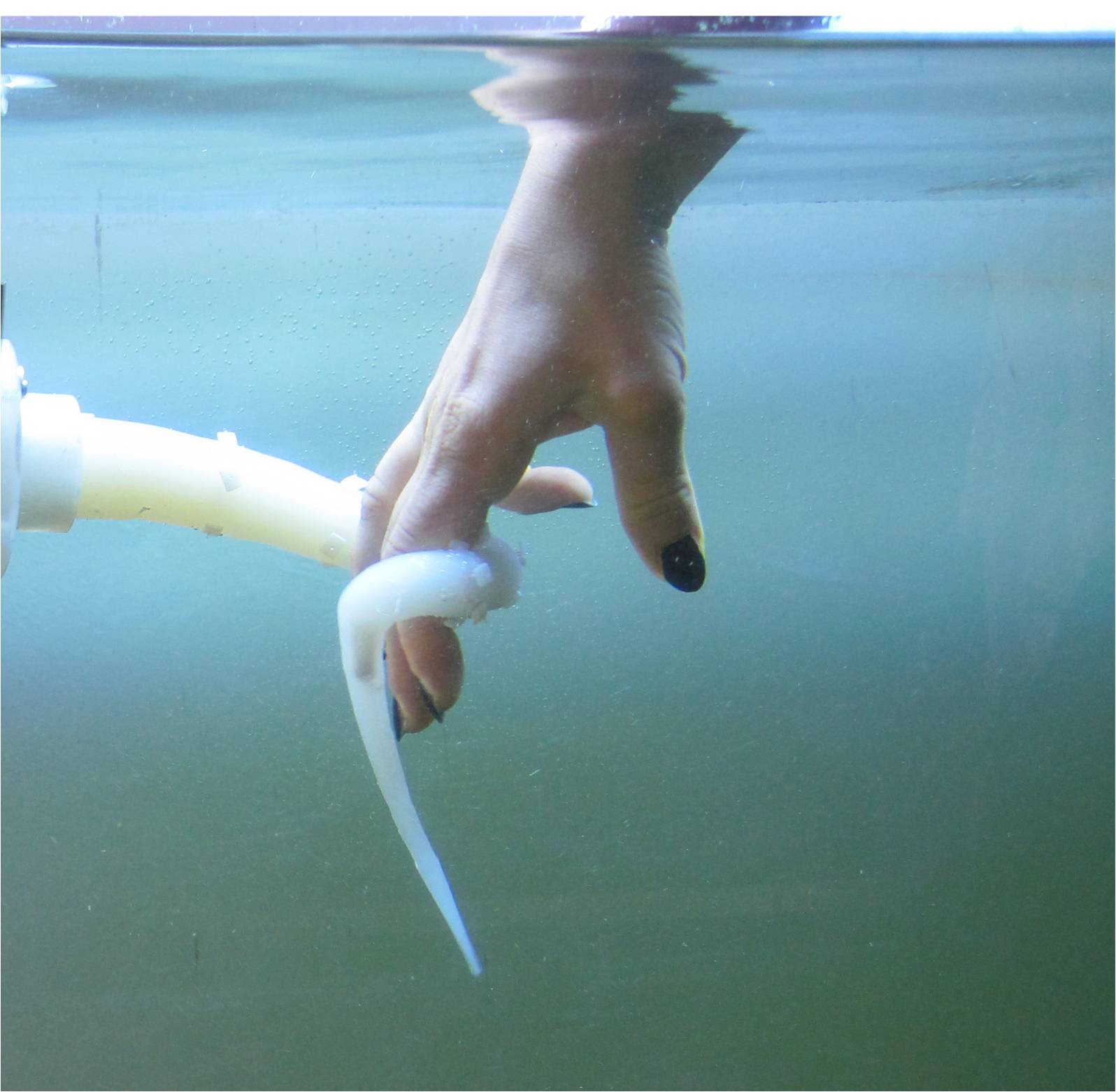
An "artificial muscular-hydrostat" unit has been developed to replicate the same octopus movements (elongation, shortening and bending) and it is used as fundamental unit in an octopus-like soft robotic arm for movement and manipulation. Arm models and control architecture have been developed to move the arm as the real octopus.
The arm is used in water and it is able to elongate, shorten, and pull, as well as to bend in all the directions. Furthermore, it is capable to grasp objects, as a bottle or a human hand, by adapting its shape to the target. Longitudinal cables and transverse SMA substitute muscle fibres, controlling contractions as soft actuators within the robot arm.
 A sensitive skin, with contact sensors embedded into silicone rubber,
surrounds the arm with passive suckers allowing the grasping of objects.
A sensitive skin, with contact sensors embedded into silicone rubber,
surrounds the arm with passive suckers allowing the grasping of objects.Having no rigid structures, OCTOPUS will be the world's first entirely soft robot, with eight flexible arms, able to reach impracticable places and simultaneously showing manipulation capability, which could open up new scenarios for marine exploration and underwater rescue.
The project is already advancing the state of the art in soft robotics (for new technologies, soft actuators, sensorized skin, simulation models for continuum structures, control architectures), as well as in other disciplines, namely biology and neuroscience, in the area related to the study of the octopus, and several spin-out projects inspired by OCTOPUS are already active, with a use even in surgery.
The inspiration from biology and the interplay among roboticists and biologists is important as encouraging new engineering design principles for sensors and actuators, as well as control strategies; on the other hand, biomimetic robotic systems developed with the implementation of biological knowledge can be used as platforms for validation and testing of the biological theories and hypothesis themselves.
The animal-like robots offer the possibility to take inspiration from nature to build up new advanced technologies, which operate with better performance in difficult or normally impracticable and unstructured environments. Consequently, the technologies developed in OCTOPUS (new actuators, new materials, sensors, new methodology for biological research) have the possibility to represent a challenge and inspire innovative solutions for various applications and fields, and to provide techniques and new technologies for the service robotics market.




Recent News
-
OCTOPUS EXHIBITION at
Cheltenham Science Festival 3-4-2013
BBC Nature News
Female octopuses stretch further
-
OCTOPUS EXHIBITION at
London Science Museum
October 30- November 1, 2012
-
9-4- 2012
IEEE Spectrum: Robotic Octopus Takes First Betentacled Steps
-
8-9-2011
New Scientist: Born to be Viral: Robot octopus shakes your hand
-
24-07-2011
The Economist: Zoobotics. A new generation of animal-like robots is about to emerge from the laboratory
-
OCTOPUS Exhibition at FET2011
The Future and Emerging Technologies Conference, Budapest, May 4-6, 2011
Watch on YouTube Channel
-
